视觉巡线(OpenCV)
Hint
操作环境及软硬件配置如下:
- OriginTank机器人
- PC:Ubuntu (≥22.04) + ROS2 (≥humble)
- 巡线场景:黑色路径线,背景有明显反差
场景说明
视觉巡线的场景如下,该例程使用黑色引导线作为识别目标,尽量向下调节相机角度,避免外界干扰。

Attation
视觉巡线受光线和颜色影响较大,强烈建议使用该例程前,先调试一下自己场地环境下引导线的阈值,并对应修改origintank_linefollower/follower.py程序中HSV阈值的上下限,完成修改后注意重新编译再运行如下步骤。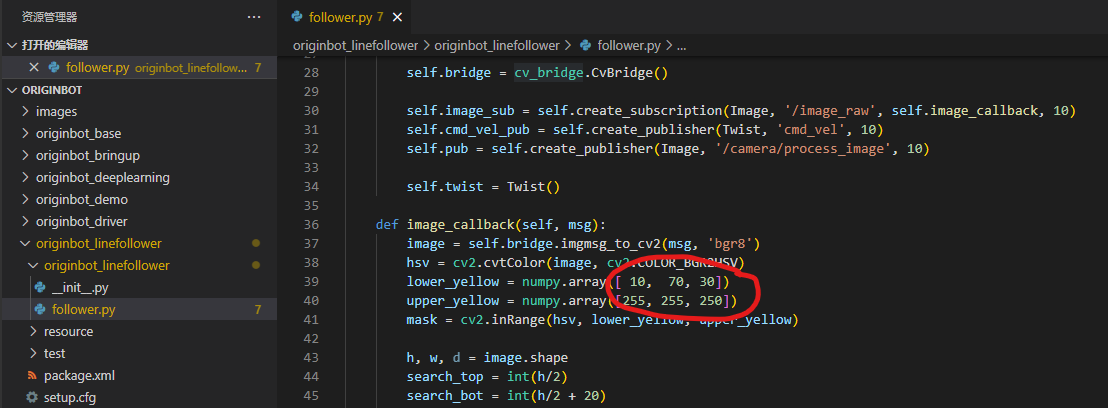
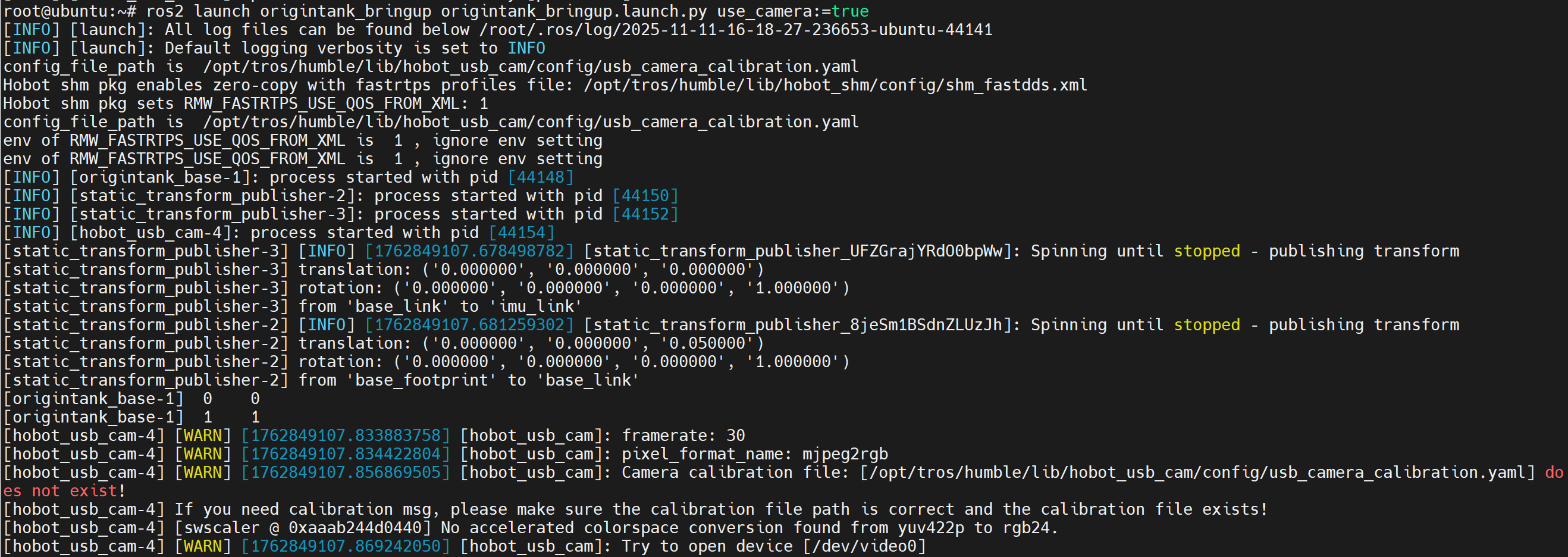
启动底盘和相机
SSH连接OriginTank成功后,在终端中输入如下指令,启动机器人底盘和相机:
启动视觉巡线功能
继续通过SSH连接OriginTank,在终端中输入如下指令,启动视觉巡线功能:

启动成功后,稍等片刻,机器人就开始自动巡线运动了。
上位机可视化显示
为了便于看到机器人的动态识别效果,在同一网络下的PC端,启动rqt_image_view:
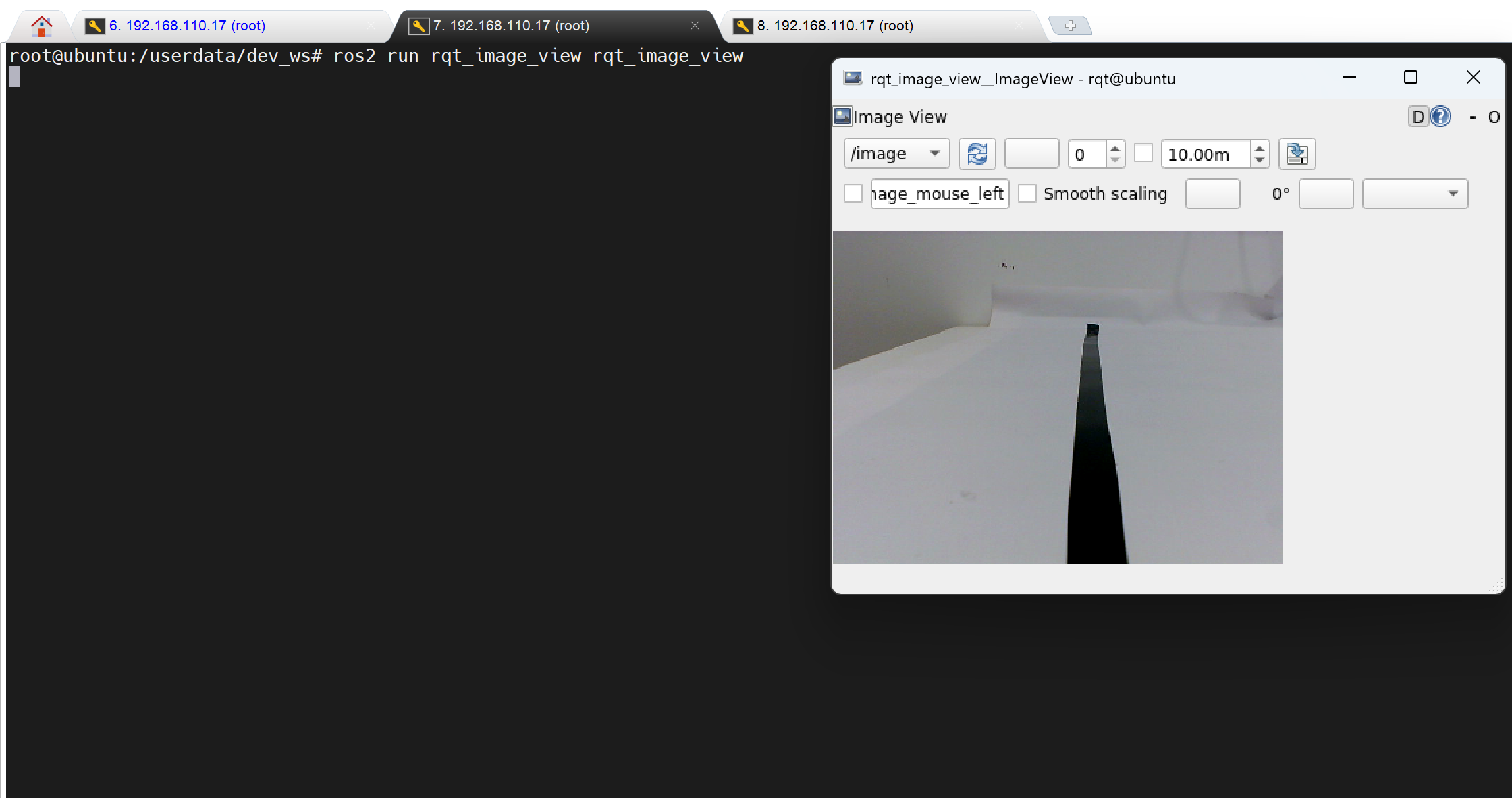
订阅/camera/image话题,即可看到动态识别的图像效果。
