图像获取
Hint
操作环境及软硬件配置如下:
- OriginTank机器人
- PC:Ubuntu (≥22.04) + ROS2 (≥humble)
功能介绍
图像获取是视觉开发中必不可少的一个基本功能,使用者可以通过读取每一帧图像来进行数据之间的交互,也可以在读取数据的基础上使用各种传统视觉算法对每一帧图像进行处理。故此功能包的作用是为解决两个问题,其一为帮助用户获取指定帧图像数据,其二为帮助开发者学习 RDK 中各种图像数据的使用。
功能运行
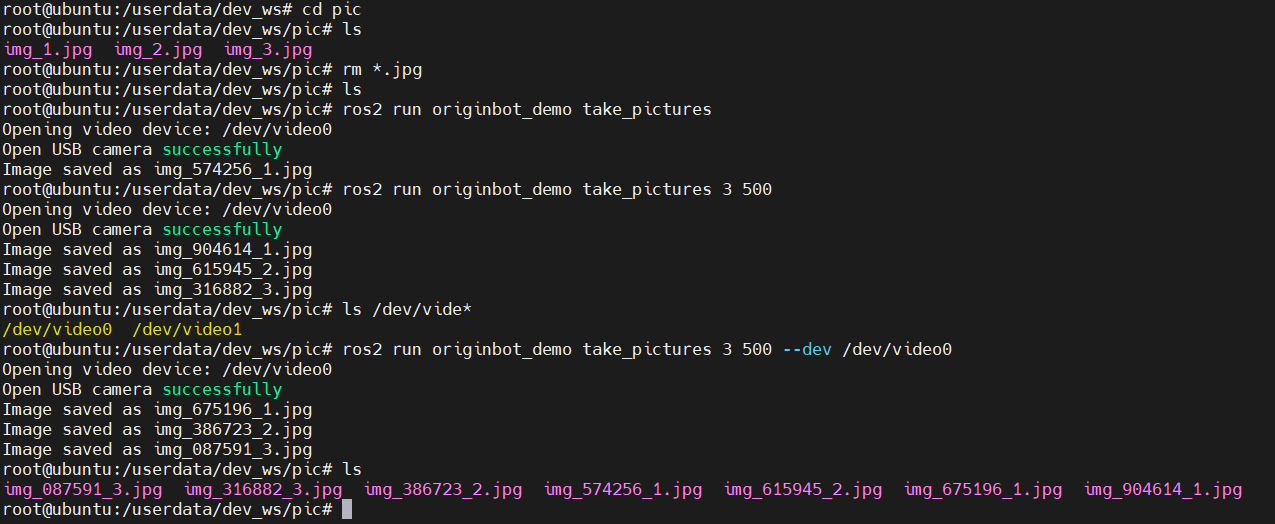
打开视频设备,获取图像数据;可输入获取图像数量和间隔时间(ms),默认为1张,默认间隔1000ms,视频设备默认为/dev/video0。
# 获取图像
ros2 run origintank_demo take_pictures
# 指定获取图像数量和间隔时间(ms)
# 例如:获取3张图像,间隔500ms
ros2 run origintank_demo take_pictures 3 500
# 指定相机设备
ros2 run origintank_demo take_pictures 3 500 --dev /dev/video0